
Yuxin Yao
Welcome to my website. I am Yuxin Yao, a 3rd Year PhD student in Information Engineering at University of Cambridge, supervised by Prof. Joan Lasenby. I am currently work with Elliott(Shangzhe) Wu. I obtained my Master of Engineering degree integrated with my bachelor at University College London.
My current research focus on world modelling and dynamical 3D reconstruction for simulation, specifically involving prior from large foudation models into embodied AI agents.
I am currently seeking for collaborations on project in these fields. Please contact me if you are interested!
Project Experience
Particulate: Feed-Forward 3D Object Articulation
Project Page / Paper / GitHub / HuggingFace
TLDR: Particulate is a feed-forward approach that, given a single static 3D mesh of an everyday object, directly infers all attributes of the underlying articulated structure, including its 3D parts, kinematic structure, and motion constraints.
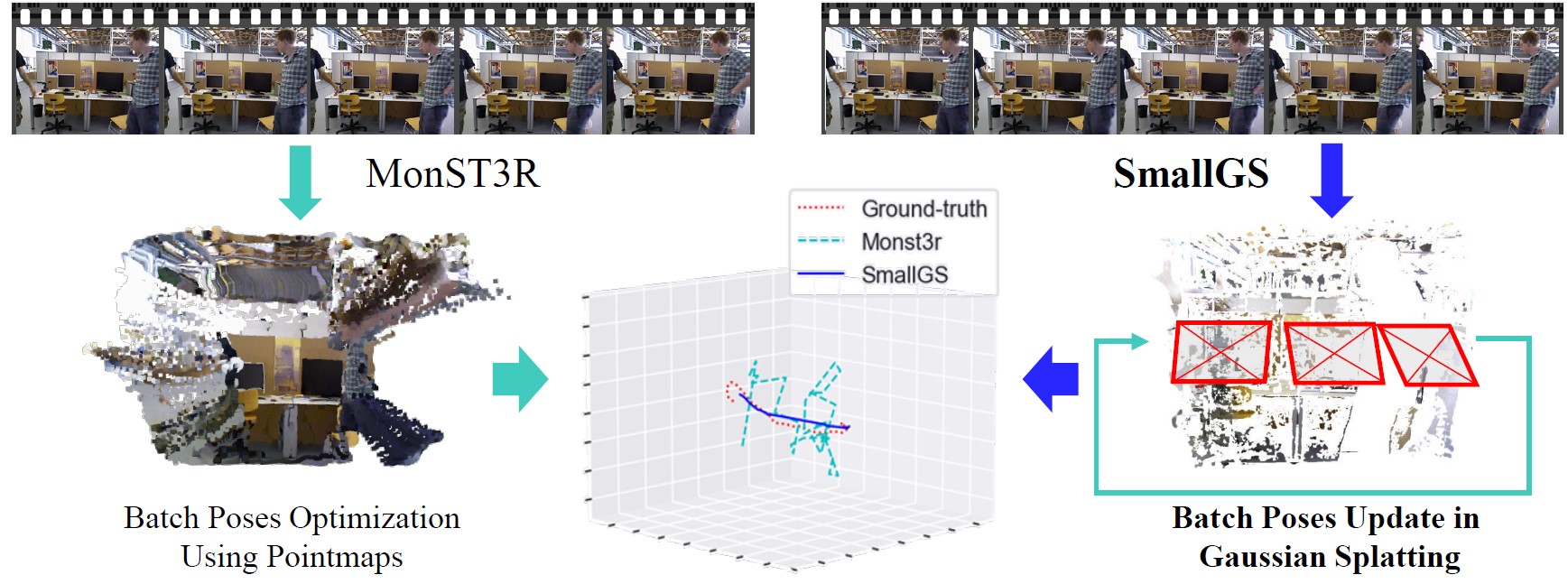
Gaussian Splatting based Camera Pose Estimation
Project Page / Paper / GitHub
TLDR: SmallGS processes a dynamic video with small baseline to obtain the camera poses. It leverages Gaussian splatting to optimize camera poses while mitigating dynamic object interference via predicted semantic masks. It does not rely on 3D alignments or triangulation, alleviating the instability in camera pose estimation caused by limited parallax and weak geometric constraints.
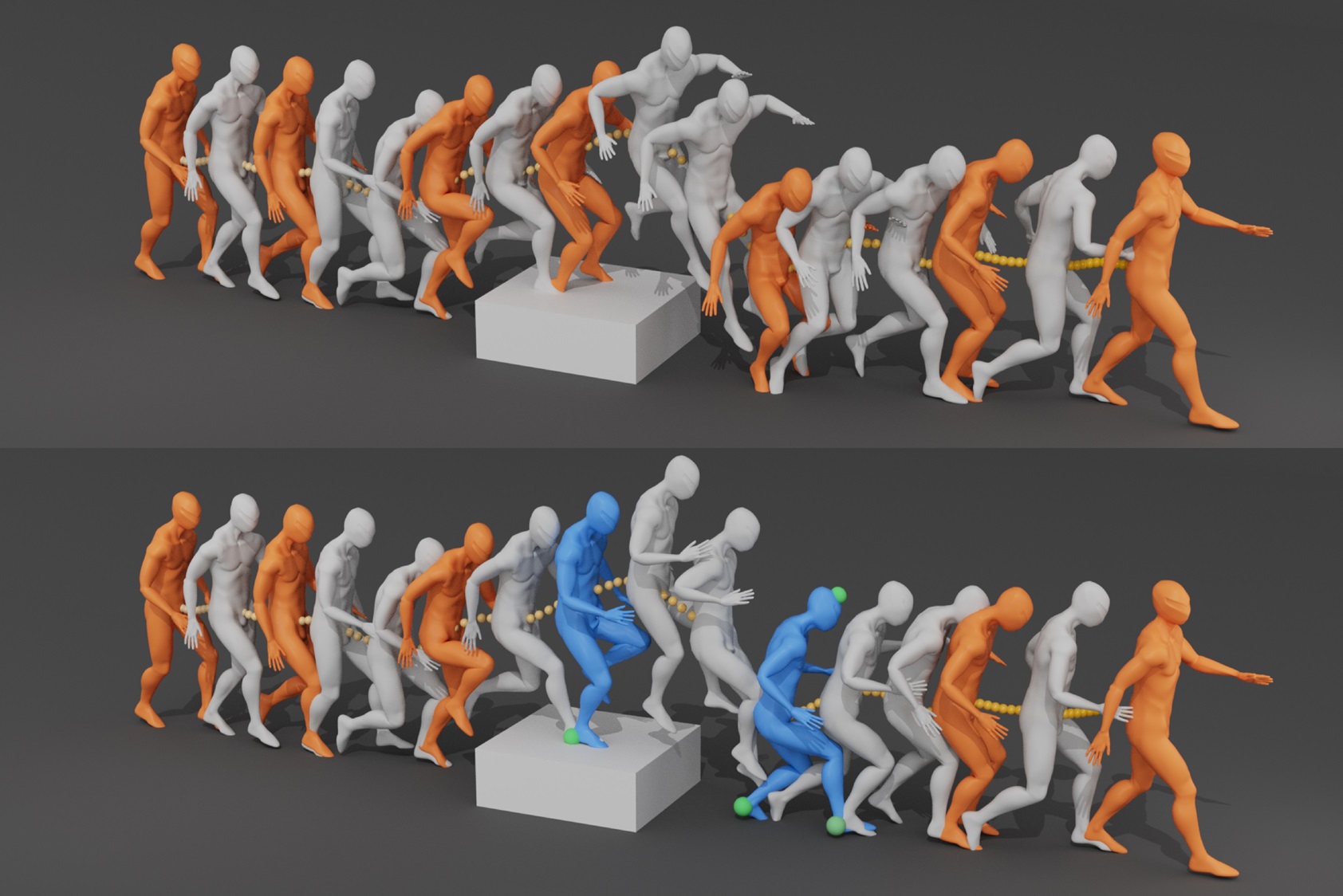
AutoKeyframe: Autoregressive Keyframe Generation for Human Motion Synthesis and Editing
TLDR: AutoKeyFrame presents a novel framework designed to automate human motion generation while retaining precise artistic control. Unlike methods that generate full sequences at once, this approach generates keyframes (critical poses) sequentially based on a user-defined path (root trajectory) and action labels, which are then connected using motion in-betweening methods.
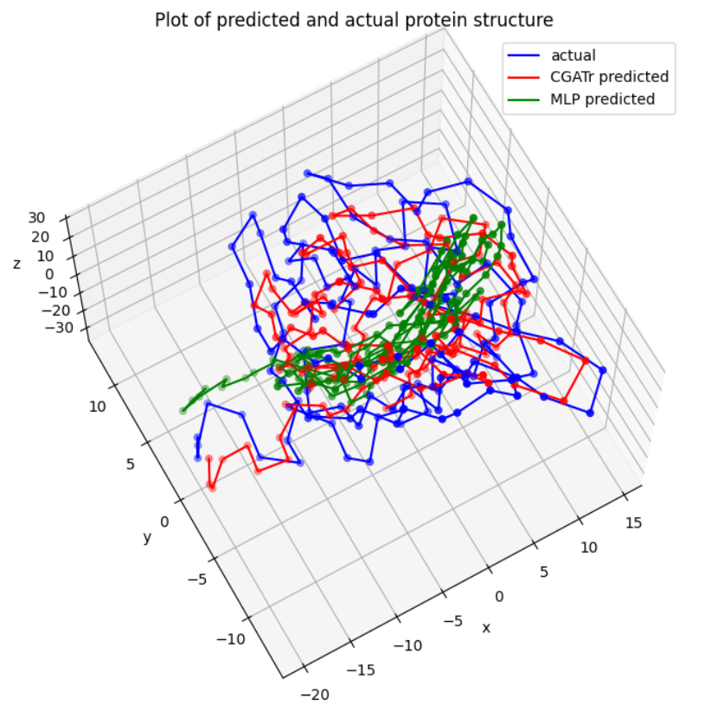
Simplifying and Generalising Equivariant Geometric Algebra Networks
TLDR: Developed CGATr, a simplified and generalised equivariant Geometric Algebra Transformer with a generalised signature. Applied it to protein structure prediction, N-body dynamics, and camera pose estimation, demonstrating strong potential for geometric deep learning.
Unsupervised Visual Relocalization
TLDR: Implemented unsupervised metric relocalization using transform consistency loss. Used direct image alignment and Gauss-Newton optimization on feature maps, a U-Net for feature and saliency maps, and generated training data with CARLA.
Human Motion Prediction on Egocentric Dataset
TLDR: Trained a motion prior on the egocentric EgoBody dataset to predict 8–9 future frames from 1–2 initial frames. Used SMPL-X/SMPL and the GAMMA model (conditional VAE with DLow and GRU) on AMASS and EgoBody.
For more previous projects and detailed description, please check my CV
Publication
Hockey, C., Yao, Y., Lasenby, J. Simplifying and Generalising Equivariant Geometric Algebra Networks. The 9th conference on Applied Geometric Algebras in Computer Science and Engineering (Abstract accepted )
Chen, H., Li, Z., Yao, Y. (2022, November). Multi-agent reinforcement learning for fleet management: a survey. In 2nd International Conference on Artificial Intelligence, Automation, and High-Performance Computing (AIAHPC 2022) (Vol. 12348, pp. 611-624). SPIE.
Yan, Y., Schaffter, T., Bergquist, T., …Yao, Y..,… DREAM Challenge Consortium. (2021). A Continuously Benchmarked and Crowdsourced Challenge for Rapid Development and Evaluation of Models to Predict COVID-19 Diagnosis and Hospitalization. JAMA network open, 4(10), e2124946-e2124946.